
空间关系描述是GIS系统的基本功能之一。我在学校学习到的空间关系分为三种:方位关系、距离关系、拓扑关系。今天我要分享的拓扑关系的标准化描述:9交叉模型。科班出身的GISer可能都知道9交模型是Egenhofer在《point set topological spatial relations》中提出的,不过,我今天不打算综述空间关系有关的理论发展,而是结合geos,分享9交模型的原理以及常见的拓扑关系描述符。
1)9交叉模型的定义
已知两个几何对象A,B(geos中称Geometry),如何描述A与B的拓扑关系?就交叉模型给出的解决方案是通过描述A与B的内部(Interior , I),边界(Boundary , B),外部(Exterior , E)之间的关系来表达A与B的拓扑关系,内部(I)、边界(B)、外部(E)三者的关系构成了一个3\times3的交集矩阵:DE9IM(a,b)=\begin{bmatrix} dim(I_A\cap I_B)&dim(I_A\cap B_B)&dim(I_A\cap E_B)\\ dim(B_A\cap I_B)&dim(B_A\cap B_B)&dim(B_A\cap E_B)\\ dim(E_A\cap I_B)&dim(E_A\cap B_B)&dim(E_A\cap E_B)\end{bmatrix}
2)维度 Dimension
dim是dimension的缩写,指的是维度。在计算几何中,维度是几何要素的重要信息之一,通过维度,可以进行一些判断。比如,高维度的要素(比如线),是不可能within在低维度的要素中的(比如点)。再比如,两个要素的交集的维度不会超过两者维度中最小者。在geos中(以及其他类似系统):
- 多边形的维度是2,含组合多边形,带洞多边形等。
- 折线的维度为1,含多线。
- 点的维度为0,含多点。
- 空集(无交集)维度为F。
讲到这里,我们有必要了解不同类型的几何对象的内部,边界,外部各指的是什么。
3)内部,边界,外部的定义
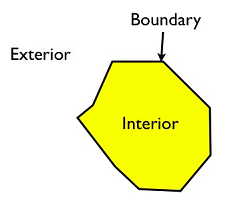
对于多边形,内部是多边形的外环和内环围起来的面部分,边界由内环和外环构成,外部是除内部和边界以外的空间其他所有部分。
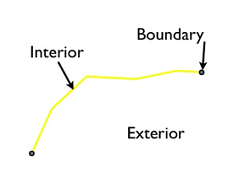
对于线要素,边界是线首尾节点(中间节点不算),内部是线上除了首尾节点之外的部分。外部是空间除了内部与边界的部分。
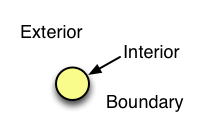
点要素的内部是点本身,其边界是空集,外部是除了点本身外的空间其他部分。当然,对于点与其他要素的拓扑关系,我们通常习惯用“点在对象上”、“点不在对象上”进行描述,而且,在空间关系的计算上,也会按照这样的思路设计算法。我的意思是,对于点的拓扑关系处理一般先判断“点是否在对象上”然后填充9交叉模型矩阵的,而不是像多边形之间的关系判断。
4)9交叉模型的布尔形式
9交叉模型交集矩阵的定义域为{F,0,1,2},那么一共可能有4^9种可能的拓扑关系。简单的考虑到外部与外部的交集的维度一定是2 ,那么可能的拓扑关系仍有8^9种,考虑很多种关系是矛盾的,剩下的组合仍然很多。这与我们希望直观,简单的表达拓扑关系的目标相差甚远。实际上,常见的拓扑关系描述符大概10种左右。为了方便描述这些关系,可以对矩阵的定义域做补充:
- 0,1,2表示非空,用T进行表示;
- 空集仍然用F表示;
- 引入*表示是什么都可以,geos中为“DONTCARE”
我们常用的拓扑关系描述符,就是采用上述6种类型描述出来的。
5)常用拓扑关系描述
Intersects
相交是指两对象的内部或边界存在交集,对应下面四种Intersection Matrix\begin{bmatrix} T&*&*\\ *&*&*\\ *&*&* \end{bmatrix}
Disjoint
相离就是不相交,因此对应于相交的“Interior,Bountry 任意存在交集”,相离的定义是Interior,Boundary均不存在交集。\begin{bmatrix} F&F&*\\ F&F&*\\ *&*&* \end{bmatrix}
Contains
A.Contains(B)表示B完全在A内部。即A,B的interior相交并且 B的Interior与Boundary均不与A的exterior相交。\begin{bmatrix} T&*&*\\ *&*&*\\ F&F&* \end{bmatrix}
Within
Within 与Contains互为转置。A.Contains(B) = B.Within(A)。为什么叫互为转置呢,这是因为within的相交矩阵是Contains矩阵的转置就好了。\begin{bmatrix} T&*&F\\ *&*&F\\ *&*&* \end{bmatrix}
Equal
Equal表示的是A和B的形状完全相同(但是,不是说他们所有的坐标都是完全一样的!A或者B都可能有冗余的坐标,比如多点共线)。Equal的交集矩阵是内部相交,但任意一方的内部与边界均不与对方的外界相交\begin{bmatrix} T&*&F\\ *&*&F\\ F&F&* \end{bmatrix}
Overlap
叠置判断对A与B的维度有要求,要求A与B的维度相同,并且要求A与B的内部的交集的维度与AB的维度相同。因为多边形(面)之间的交集,点之间的交集均与他们的维度相同,线之间的交集可能会是点,线两种情况,所以特别将线与面、点之间的矩阵进行了区分,要求线的内部交集为线。
面、点的交集矩阵:\begin{bmatrix} T&*&T\\ *&*&*\\ T&*&* \end{bmatrix}
线的交集矩阵:\begin{bmatrix} 1&*&T\\ *&*&*\\ T&*&* \end{bmatrix}
Touch
Touch表示的是两个几何要素之间的临接关系。touch关系的要点是:
两个元素的内部(interior)不能有交集,但是内部与边界,边界与边界可以有交集。
参与的两种元素不能同时为点类型。(点没有边界,内部与内部不相交变成相离了)
\begin{bmatrix} F&T&*\\ *&*&*\\ *&*&* \end{bmatrix}
Cross
穿越的定义是A与B的内部有交集,但交集的维度要比A与B最大的维度要小。按照这个标准,点点与面面不可能存在cross关系,因为他们内部的交集的维度与他们的维度是相同的。同样,对于线线的交集要区别对待,指定其内部的交集为0(而不是1)。
非线线交集矩阵:\begin{bmatrix} T&*&T\\ *&*&*\\ *&*&* \end{bmatrix}
6)对拓扑关系的分析:从矩阵的角度
从上述9交叉模型矩阵的表达上,我们已经能够分析出很多有趣的信息了。
1.如果交集矩阵是对称的,那么对应的拓扑关系满足交换律的。A.Relation(B)=B.Relation(A)
可以交换的拓扑关系有(对应矩阵对称):
Intersects,Disjoint,Equal,Overlap,Touch,Cross(线线)
不可以交换的拓扑关系有:
Contains,Within,Cross(非线线)
2.如果两个关系矩阵互为转置,那么这两个关系可以调换位置A.Relation1(B)=B.Relation2(A)。满足条件的关系有
Contains,Within
3.如果两个矩阵互补,那么两种关系也是互斥关系。满足条件的有
Intersects,Disjoint
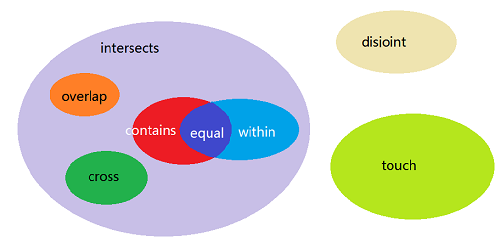
4.拓扑关系之间的关系
上述8种关系并全不是互斥的,元素A,B可以同时满足多种拓扑关系。这些拓扑关系的“关系”更适合使用文氏图来描述:
参考文档:
Dimensionally Extended 9-Intersection model(内部、边界、外部定义的图片来源)
您好,connection中描述似乎有误,谢谢您的文章!
您好,感谢指正,经过核实是一处笔误,已经进行了修改。
你好,想问一下,线与线,线与面,面与面,共线关系判断,用九交模型能严格表达吗?
直接传0,1,2,不传T,应该也是可以的吧?
可以,0,1,2 表示的是对应交集的维度,T代表{0,1,2}中任意一种情况
“如何描述A与B的拓扑关系?就交叉模型” 中有个错别字,就->9;
“9交叉模型交集矩阵的定义域为{F,0,1,2},那么一共可能有4^9种可能的拓扑关系。简单的考虑到外部与外部的交集的维度一定是2 ,那么可能的拓扑关系仍有8^9种”,
为什么去掉一些可能之后,拓扑关系的数量还变多了