
业务中使用曲线的目的,主要是因为曲线具有高阶导数连续的特点。比如设计公路,不仅要求方向连续(G^1),而且还要求曲率连续。因此,求导是bezier曲线的一项基本而且重要的功能。
1.导数公式的推导
bezier曲线的矩阵形式如下:C(u) = \begin{bmatrix}B_0&B_1& \cdots & B_n\end{bmatrix}\begin{bmatrix}P_0\\P_1\\ \cdots \\ P_n\end{bmatrix}
2.导数的计算
已知n阶bezier曲线的导数是n-1阶bezier曲线 C^{\prime}(u) =sum_{i=0}^nB_{n-1,i}(u)Q_i ,因此bezier曲线的求导可以转换为对低阶曲线的求值操作,可用德卡斯特里奥(De Casteljau’s)算法计算。
3.bezier首尾点的导数
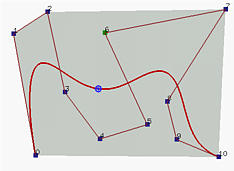
在bezier曲线的定义中我们推导过,bezier曲线的首尾点与其首个,末尾控制点重合。因为bezier曲线的导数也形成bezier曲线,因此在u=0时的导数为n(P_1-P_0),在u=1时的导数为n(P_{n}-P_{n-1}),也就是说,曲线在首尾处的切线与其首个、末尾处的控制点的方向是一致的!这是一个非常棒的性质,使得bezier曲线的修型更简单了,无怪乎得到了设计人员的青睐。下图可以看到这种现象:
4.连接两根bezier曲线并保证方向一致
当图像由多个bezier曲线构成,并且要求曲线接头的时候方向连续(C^1)。比如,要求m阶bezier曲线(P_0,\cdots,P_m)与n阶bezier曲线(Q_0,…,Q_n)在P_m与Q_0连续,首先要求Q_0=P_m,然后 导数相等 m(P_m-P_{m-1}) = n(Q_1-Q_0)。这说明三点共线,并且满足一定的模长关系达到C^1。如下图:

当三者仅共线时,曲线满足G^1。C^1与G^1的区别可以打个比方,假如曲线为两段公路,C^1曲线可以保证方向和速度连续变化,但是G^1曲线只能保证方向连续。
当m=n时,当且仅当P_{m-1}P_m与P_mQ_1的长度一样并且三者共线时,曲线保证C^1连续。我用coreldraw学习做地图时,感觉coreldraw的bezier曲线的工具非常好用。它用一个等长度的手柄保证bezier接头处方向连续。如下图中的虚线:
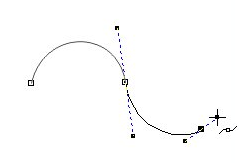
手柄的端点即为控制点。默认接边时,调节鼠标所在端点时,其对称的控制点也会相应移动保证方向连续。其中的数学原理估计很多设计人员是不了解的,但是丝毫不影响coreldraw成为非常易用的工具,这就是好的产品的特点。
5.高阶导数
参数曲线的m阶导数的递推公式为m-1阶导数曲线的一阶导数。f^{(m)}(u)=\frac{d}{du}f^{(m-1)(u)}
以此类推。
6.bezier曲线的打断
所谓打断bezier曲线,是指在给定参数u处,将原bezier曲线分成两段,其形状保持不变,阶次保持不变,打断后的两段仍然是bezier曲线。但是,每一段曲线有自己新的控制点序列与参数区间,原来的u\in[0,1]分裂为独立的t\in[0,1];r\in[0,1]。
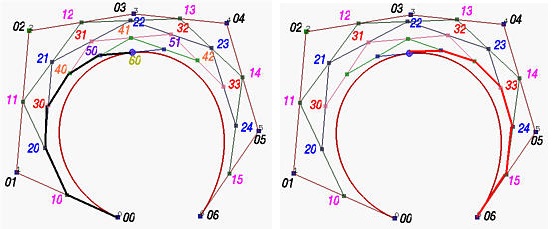
德卡斯特里奥(De Casteljau’s)算法 可以用来完成新控制点的计算,回想一下,deCasteljau方法进行对原始控制点进行n次“切角”运算,最后一次切角的结果就是对应u的点。其实,每个迭代形成的新的点列的首点与尾点,分别构成了在u处打断的两条beizier曲线的新控制点序列。如下图示,黑色线是左侧bezier曲线的新控制点,红色线是右侧bezier的新控制点。
我的算法实现如下:
/*!
*\brief Bezier曲线的打断
*\ param const std::vector<Point> & control_vertex 控制点序列
*\ param double u 打断处的参数 (0,1)
*\ param std::vector<Point> & cv_left 打断后前半部分的控制点
*\ param std::vector<Point> & cv_right 打断后后半部分的控制点
*\ Returns: void
*/
void Bezier::Subdividing(const std::vector<Point>& control_vertex, double u,std::vector<Point>& cv_left,std::vector<Point>& cv_right)
{
cv_left.resize(control_vertex.size());
cv_right.resize(control_vertex.size());
int p = control_vertex.size()-1;
//将 cv 拷贝到 cv_right,因为每次迭代计算的点数依次少1,
//因此可以直接用cv_right记录,全部算完后就是所有的尾点集合
std::copy(control_vertex.begin(), control_vertex.end(), cv_right.begin());
cv_left[0] = cv_right[0];
//p次迭代
for (int i = 0;i<p;++i)
{
for (int j = 0;j<p - i;++j)
cv_right[j] = (1.0 - u)*cv_right[j] + u*cv_right[j + 1];
//左侧控制点为每次迭代的首点
cv_left[i + 1] = cv_right[0];
}
}
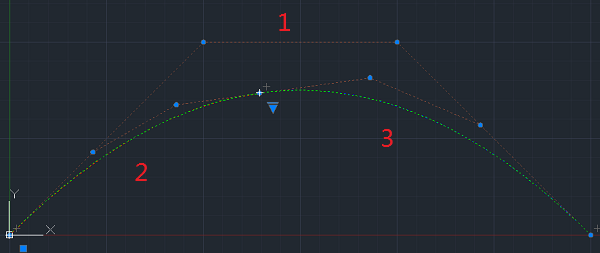
下图是上述程序对bezier曲线在u=0.4打断后的效果 写入dwg在AutoCAD中的展现。1为原始bezier曲线,2,3为打断后bezier曲线。
本节参考 Introduction to Computing with Geometry 第五,六节
有一个小错误
> https://imgchr.com/i/8dH9de
推导过程中
最后应该是连加到 n-1,而不是 n
是的
能从Bezier曲线的二阶导数得到该曲线的曲率图形吗?显示成曲率梳的状态。
从Bezier曲线的一阶导得到Hodograph比较容易,与原曲线结合显示,也能看出是切向量的集合。但是二阶导就比较难结合起来观察了(以为是曲率梳的图形,但实际差距比较远)。
希望作者能将一阶导和二阶导与原曲线这些结合起来探讨一下。